專注起重機安全監控管理系統為工業安全行業保駕護航!

引言
塔式起重機大規模應用于工程建設中,我國每年都會發生
多起塔機倒塌事故?。為了防止重大事故的發生,保證塔機運
行安全可靠,減少因事故造成的人員和經濟損失,非常有必要
開發一套可靠性和實時性高、功能強大、成本低的安全監控系
統。控制器局域網CAN(ControllerAreaNetwork)總線是一種有
效支持分布式實時控制的串行通信網絡。CAN總線由于具有
傳輸距離長、報文短、通信速率高、出錯率低、糾錯能力強、實時
性和可靠性高、控制簡單等優點j,被廣泛應用于自動化控制
系統中。基于CAN總線的塔機安全監控系統可以很好的滿足
上述要求。
系統網絡拓撲采用總線型拓撲。這種結構優點是采用單 一 信道作為傳輸介質,所需電纜長度短,布線容易,工作的可靠 性高,增加和減少節點都很方便。
一 、塔機安全監控系統設計
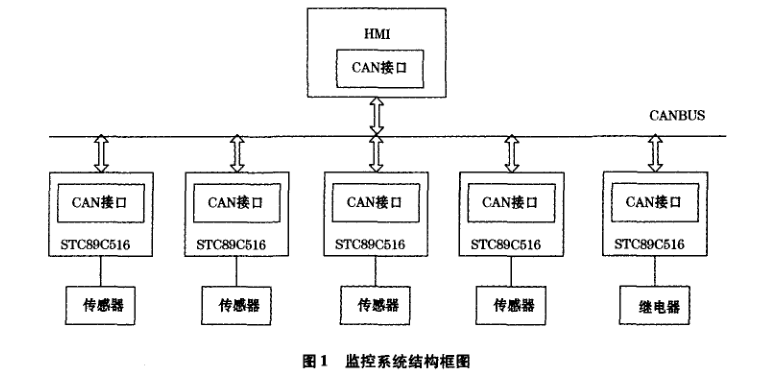
1.1監控系統整體結構設計
塔機安全監控管理系統主要由HMI、CAN總線、數據采集模塊和繼電器
模塊組成,系統結構如圖1所示。系統數據采集模塊有起重量
檢測模塊、幅度檢測模塊、高度檢測模塊和角度檢測模塊。HMI
通過CAN接口將系統初始參數(起重零點和參考載重校準信
號、最小幅度和最大幅度校準信號、起升高度零點和起升標準
高度校準信號、回轉角度零點校準信號)發送到CAN總線上,
各數據采集模塊通過判斷接收保存需要的參數。傳感器檢測
塔機運行時的工作參數:起吊重量、小車行走幅度、重物提升高
度和臂架回轉角度,各個數據采集模塊的MCU將檢測到的數
據處理后通過CAN接口實時發送到CAN總線上,HMI通過
CAN接口接收數據采集模塊發送到CAN總線上的數據,并通
過硬件和軟件編程方式對接收到的現場數據進行顯示、存儲、
比較報警處理。
塔機安全監控系統主要功能:
(1)實時檢測功能,實時監測塔機運行時的各狀態參數。
(2)實時顯示功能,實時顯示塔機運行時的工作參數值。
(3)報警和自動斷電停機功能,系統識別塔機的運行狀態
后,做出相應的處理。當塔機運行時的狀態參數值超過其設定
的極限值時,系統報警并斷電停止塔機工作。
(4)參數設定功能,由于不同型號塔機具有不同的固定參
數,可通過按鍵實現系統參數的修改設置,提高系統的通用性。
(5)數據存儲功能,記錄塔機工作參數,作為分析事故原因
的原始數據以及塔機工作損耗的參考。
1.2硬件電路設計
該監控系統硬件主要有單片機STC89C516、液晶顯示器
CA320240B、CAN接口、CAN總線、A/D轉換芯片、U盤及U盤
接口芯片等。系統以STC89C516為核心,實現對塔機運行過程
狀態的監控、顯示、記錄和報警。系統模塊有人機界面模塊、數
據采集模塊和繼電器模塊。數據采集模塊共有4個部分:起重
量檢測模塊、幅度檢測模塊、高度檢測模塊和角度檢測模塊,完
成基本的模擬量和數字量的采集及CAN總線的通信功能。
1.2.1CAN總線
CAN總線是一種性價比非常高的現場總線,與一般的通信
總線相比,它的數據通信具有突出的可靠性、實時性和靈活
性J。主要技術特點有:多主方式;節點分成不同的優先級,可
滿足不同的實時要求;采用非破壞總線仲裁技術;極好的檢錯
效果;通信距離最長lOkm,速率最高達1Mbps.CAN總線上任
意2個節點之間的最大傳輸距離與其位速率的關系
塔機上的通信距離一般就幾十m長,CAN總線完全可以
滿足要求,結合塔機工作的實際情況,選擇最高通信速率1Mb-
ps·
1.2.2CAN接口電路設計
CAN接口主要由CAN控制器SJA1000和CAN收發器
TJA1050組成。CAN控制器SJA1000支持CAN2.0A和
CAN2.0B協議,可以支持11位、29位標識碼,具有很強的擴展
性。CAN收發器TJA1050是CAN控制器與物理總線之間的接
口芯片,支持對CAN總線的差動發送和接收功能。它的電磁
抗干擾EMI性極高,且與ISO11898標準完全兼容。CAN總線
接口是數據采集模塊和上位機通信的模塊,如圖2所示。
SJA1000與單片機的引腳連接如圖所示。TJA1050的引腳8
(S)用于選定收發器的工作模式,引腳接地表示TJA1050進入
高速模式。收發器和總線的接口部分必須要加保護防干擾電
路,和魄為CAN匹配電阻,電容C具有退藕作用,c3和c4
起濾波作用。
1.2.3起重量數據采集模塊硬件電路設計
塔機的工作環境惡劣,周圍各種干擾較為嚴重,系統的抗
干擾能力、可靠性、通用性和靈活性要強,根據CAN通信模塊
加上不同外部電路,電源電壓調節電路人機接口輸入電路等。
模塊的電路結構如圖3。
重量檢測模塊傳感器采用DEE系列稱重傳感器,為了提高
測量的準確性,根據實際情況不同噸位的塔機應采用不同量程
的傳感器。A/D轉換采用16位高精度串行模數轉換器
CS5523,該芯片內集成了1個儀表放大器、1個可編程增益放大
器、多路開關、數字濾波器、自校正和系統校正電路。通過簡單
的串行連接,MCU可方便地控制CS5523,實現多通道高精度的A/D轉換。
傳感器將檢測到的信號,經A/D轉換器處理將模擬信號轉換成數字信號輸入MCU,MCU進一步處理數據,在程序中計算當前重量以及當
前重量占總重量的百分比。電路中單片機的外部中斷信息由SJA1000的內部寄存器,提取數據確定具體的中斷事件,并做出下應的反
饋。
1.2.4 其它數據采集模塊電路設計
其它數據采集模塊和角度檢測模塊的檢測工作原理完全相同。在塔機幅度、高度和角度限制器的伸出軕上加一塊一半是N極一
半是S極的圓形磁鐵,當塔機工作時磁鐵和軸一起旋轉,利用磁鐵轉極性的變化檢測出小車牽引器機、卷楊機和塔臂轉過的圈數,在
程序中計算出幅度、高度和角度。硬件原理框如圖4所示
1.2.5人機界面硬件電路設計
圖5為人機界面原理框圖,液晶顯示器CA320240B使用功能強大的S1D13305作為控制器。內部固化160種5*7點陳的字符,具有文本和圖
形混合顯示功能,系統采用Inte8080時序。
顯示器實時顯示塔機工作時的力矩、重量、幅度、高度和角度數值,并圖形顯示塔機起重機特性圖和當前工作點的位置。圖6為塔機
起重特性圖,圖中陰影部分為塔機安全工作區域,正常工作點必須處于陰影區域內,當工作點超過最大力矩的80%時系統給出預警信
號(黃色LED燈亮報警),超過100%發出報警信號(紅色LED燈亮和蜂鳴器報警),同時對繼電影模塊動作止電動工作。
系統采用大容量8GU盤存儲數據,存儲內容為塔機每次開作的年份、日期、開始時間、結束時間、開始高度、結束高度、開始角度、
最大力矩和警告。當發生安全事故或需要評估塔機的使用壽命時,可導出數據進行分析。


010-86380355 18600916628
北京市大興區榆垡椿蓉園別墅區11號
河南省?國家大學科技園(東區)9號樓
